
日本での超伝導リニア運行に向け、南アルプストンネルの工事が本格的に始まりました。超伝導リニアが走る中央新幹線は最終的に東京―名古屋―大阪を結ぶ路線となり、全線開業は最短で2037年を予定しています。
一方、日本以外に目を向けると、この数年で「ハイパーループ」という新式の交通手段が考案されています。こちらの売りも高速走行なのですが、超伝導リニアと一体どう違うのでしょう?
本記事では超伝導リニアとハイパーループを取り上げ、それぞれの技術的な解説を行っていきます。
超伝導リニアのしくみ
超伝導リニアの基本となるユニットは、車体に搭載された超伝導磁石と、左右のガイドウェイに設置された2種類のコイルです。ガイドウェイに設置されたコイルは用途別に「推進コイル」、「浮上・案内コイル」と呼ばれます。
超伝導リニアはこの3つのユニットを使い、浮上・走行・上下左右の位置調整を行います。それぞれをどう活用して動作するのか、これから見ていきましょう。
前進する原理
超伝導リニアはリニア同期モーターというシステムで前進します。
地上のガイドウェイ内に設置された推進用コイルに電流が流れると、コイルからは磁界が発生し、電磁石として機能します。それらのコイルと、車体側面に設置された超伝導磁石を反発させ合うことで車体を前進させるのです。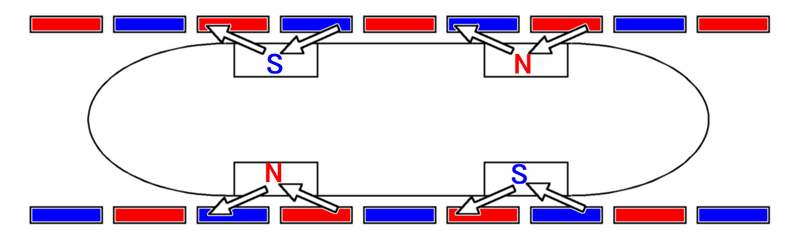
推進力のオンオフ、そして加減速のコントロールは、全て地上の推進コイルに流れる電流の大きさで調節されます。このため超伝導リニアの車体には制御機構を組み込む必要がなく、無人運行が可能なのです。
浮上する原理
超伝導リニアは、車体に搭載された超伝導磁石をガイドウェイ内の「浮上・案内コイル」に引き合わせることで浮き上がります。
浮上・案内コイルは推進コイルと違って電流が流れることはありません。これを磁石として活用するために、電磁誘導という現象が利用されます。
電磁誘導とは、磁石をコイルに近づけると磁場が乱され、コイルに電流が流れるという現象です。電流が流れた回路には磁界が発生するので、電源につながっていないコイルが一時的に電磁石のように振る舞うことになります。
このときコイルが発する磁界の強さは、磁石がどれだけ速く動いているかで決まります。水面に勢いよくものを投げ込むと大きな波紋ができるように、速度が高いと磁場が強く乱され、結果として発生する磁力も大きくなるのです。
超伝導リニアの場合、車体の超伝導磁石がガイドウェイのコイルに作用します。コイルから発生する磁力の強さは磁石の移動する速さ(=車体の移動速度)に応じて強くなるので、車体の移動速度が増せばそれだけ浮上・案内コイルが発揮する磁力が強くなり、やがて車体が浮き上がるという仕組みなのです。
当然ながら、ある程度の速度にならなければ浮き上がることはできません。なので、低速で走っている超伝導リニアは通常の列車と同じく車輪で走ることになります。
上下左右の位置調整
浮上・案内コイルはもう一つ、車体の位置を調節するための役割を担っています。超伝導リニアの車体の左右位置を調節することを「案内」と呼びます。
位置調整を行う上で重要になるのは、「ヌルフラックス方式」と呼ばれるコイルの配置です。
浮上・案内コイルは、8の字を描くように上下に重なって配置されています。車体の超伝導磁石の位置が8の字の真ん中にある時は、上下のコイルに作用する磁束(磁界の強さと方向)は等しくなるため、上下のコイルに同じ電圧で向きが反対の誘導電流が発生します。この場合、8の字の上下でそれぞれのコイルの電圧が打ち消し合い、トータルで電流は流れずに浮上・案内コイルの磁力は発生しません。この位置こそ、車体の高さが安定する位置なのです。
次は車体が下に寄った場合を考えてみましょう。この場合、車体の超伝導磁石は下側のコイルに近づきます。すると下側のコイルにかかる磁束が強く、上側にかかる磁束は弱くなります。こうなると上下のコイルでそれぞれ電圧の違う誘導電流が発生することになり、電流が打ち消されることはありません。結果として、上下それぞれの浮上・案内コイルが電磁石として機能し始めます。
コイルに電磁誘導が起きて電磁石になる際、S極とN極はある規則に従って決まります。簡単に言えば、コイルと磁石が近づく場合は磁石と反発する極に、コイルから磁石が遠ざかると磁石を引き寄せる極の電磁石となるのです。近づくと突っぱねられ、遠ざかるとすがりついてくる気難しいネコを思い浮かべてみてください。電磁誘導で電磁石になるコイルは、磁石の動きに応じて態度を変えるのです。
なので、仮に車体の電磁石のS極がガイドウェイのコイルに面しているとする場合、距離が近づいた下側のコイルがS極に、距離が遠ざかった上側のコイルがN極の電磁石に変化します。すると車体は上側に引っ張られ、やがて上下のコイルの中央へと戻されていくのです。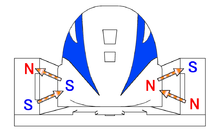
左右の位置調整も原理は同じです。
左右のガイドウェイに設置されているコイルは線路の下で接続されており、左右のコイルもヌルフラックス配置になっています。あとは上下の位置調節と同じで、車体がずれると前述のしくみによる復元力がはたらき、左右のコイルの中央に車体が戻っていきます。
ヌルフラックス配置のコイルを使ったこのシステムはコイルへの通電が不要で、かつ自動で位置制御を行うので、制御機構を組み込まなくても高い信頼性での車体制御ができるという点が利点でしょう。
必要な技術
超伝導磁石の小型・高性能化
リニアモーターカー開発の歴史は、強力な磁力を生み出す超伝導磁石の研究開発といっても過言ではありません。リニアモーターカーの車体を浮上させることができるほど強力な磁力を生み出すには、超伝導磁石が不可欠だったのです。
リニアモーターカーの研究が日本で始まった1960年代以降、重い車体を浮き上がらせるための超伝導磁石の高性能化、そして車体に積み込めるサイズへの小型化が連綿と続けられてきました。近く実現を見るリニアモーターカーの運行は、その積み重ねがようやく実を結んだ結果なのです。
さらに実際の運行に向けて、路線敷設のためのトンネル工事も大きな課題です。2015年から本格着工となった南アルプストンネルは、地表からトンネルまで1100mという深さだけでなく、トンネルが通る活断層は地質が場所によって変化するため、掘ってみないとわからないことがあるなど難度の高い工事として知られています。
ハイパーループのしくみ
ハイパーループの発想の源は、車体を浮き上がらせて車輪と路面の摩擦をなくすだけでなく、空気抵抗もなくしてより速く移動しよう、というものです。
最初にアイデアをまとめたのは、SpaceXやテスラ・モータースを起業したことで世界的に知られるイーロン・マスク。ハイパーループの開発アプローチはユニークなもので、ある1社が設計開発を行う代わりに、基本設計をオープンソースとして公開し、そこからの開発は他企業や研究機関などに委ねるというものです。
初期設計が公開されたのは2013年。それ以来、複数の研究機関がアイデアを寄せて設計を洗練させ、いくつもの企業が個別に開発を進めています。イーロン・マスクは研究開発用のテストトラックを用意したり、広く参加者を募ったデザインコンペを開催したりして間接的に開発に携わっています。
車体とチューブの構造や材質
ハイパーループの基本的な構造は、内部の空気を薄くした鋼鉄製のチューブ内で車体を浮上させて走らせるというものです。空気を薄くする理由は空気抵抗を減少させ、移動速度を向上させることにあります。
チューブの中で車体を走らせるという方式には、高架の上に設置することが可能という利点があります。必ずしも地上に線路を敷設する必要がないので、例えば都市部に新たなハイパーループ路線を敷設する場合、道路に高架を設置してそこに作れば大規模な土地の確保は不要で、その分コストを削減できるとされています。
前進する原理
ハイパーループが前進する原理は、磁力の反発を利用しています。これだけ聞くとリニアモーターカーと変わらないように思えますが、細かく見るとかなり異なる設計になっているのです。
イーロン・マスクが最初に提案した設計では、車体に電磁石は搭載されていません。代わりにアルミでできたスケート靴のブレードのようなものがついていて、レール両端についた電磁石でそれを挟み込むような構造になっています。
ここでも電磁誘導が登場します。
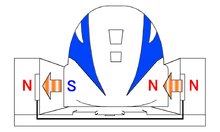
ハイパーループのレールは鉄でできていて、そこに銅製のコイルが埋め込まれています。これに電流を流すと電磁石となり、周囲に磁界が発生。この磁界にアルミ製ブレードが近づくと、ブレードに誘導電流が流れます。このとき同時に、周辺の磁界と反発する極性の磁界がブレードに発生し、レールとブレードが反発しあいます。ハイパーループはこの反発力を動力として前進するのです。
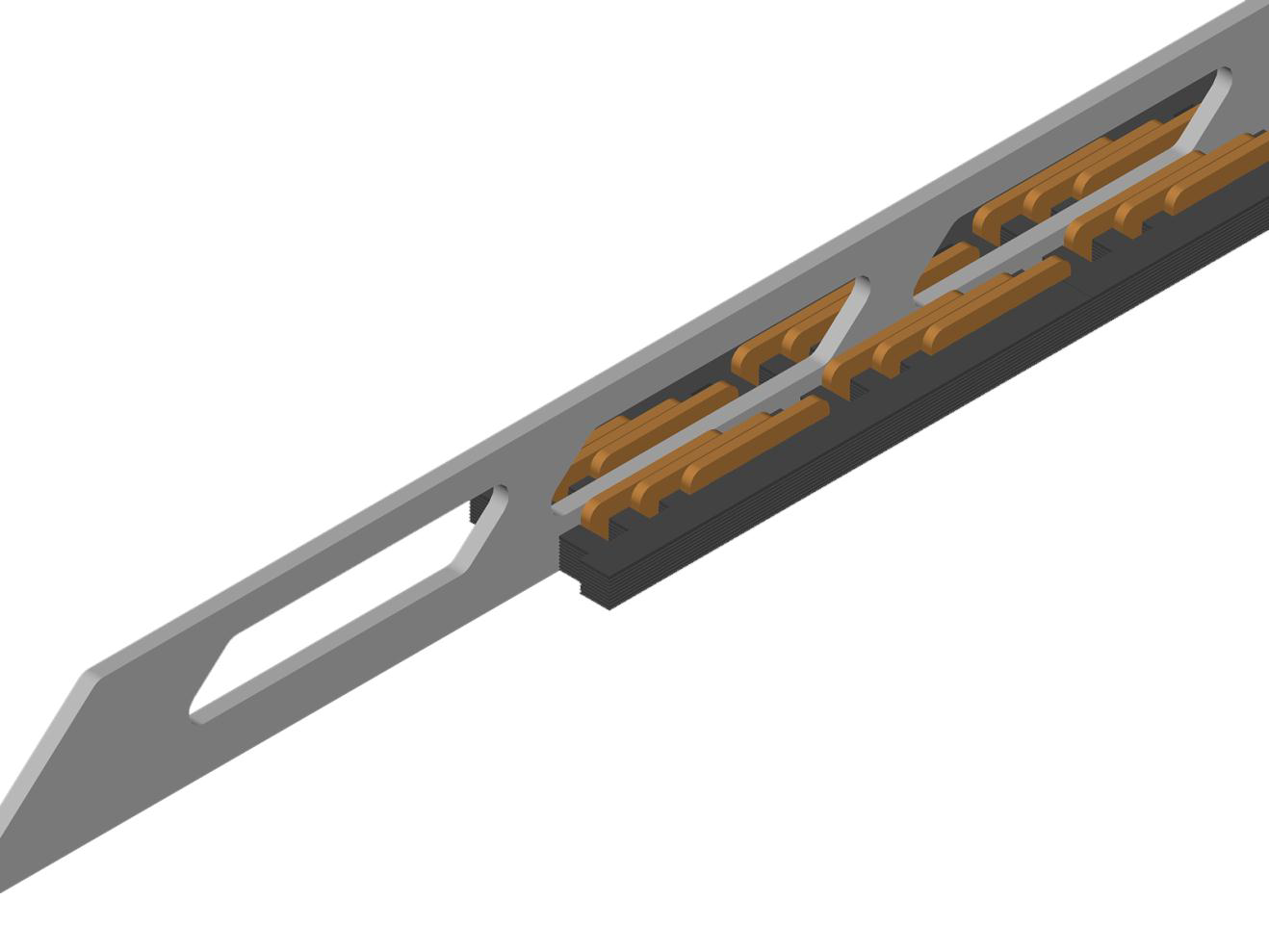
(銀色の部分が車体のブレード、茶色の部分が線路に埋め込まれるコイル。出展: Hyperloop Alpha)
レールで本体のブレードを挟み込むこの方式だと、レールの磁力が釣り合えばブレードはどちらの壁とも等間隔が保たれます。なので、ハイパーループの場合、推進用のコイルが車体の左右位置を保持する役割も担っていることになります。
浮上の原理
ハイパーループもリニアモーターカーと同じく浮上して走ります。イーロン・マスクの発表した初期設計は、エアベアリングを使っていました。これはコンプレッサーで車体前面の空気を取り込んで圧縮し、壁に面した吹き出し口から高圧で空気を送りこみ、その圧力で車体を支えるというものです。
イーロン・マスクが初期の設計案をまとめた『Hyperloop Alpha』では、リニアモーターカーと同じく磁気浮上が検討されたもののコストの問題からエアベアリングを採用したということが書いてあります。
しかしその後、設計の改善に加わった研究機関からは磁気浮上のほうがよいという意見が寄せられます。現在ハイパーループ開発の大手のうち、HTT(Hyperloop Transportation Technologies)とTranspodの2社がエアベアリングでなく磁気浮上を採用していることからも、主流はすっかり磁気浮上に移ったとみていいかもしれません。
実現までの課題
ハイパーループの初期案が発表されたのは2013年のことですが、技術自体はすでにかなりの完成度に達しています。
ハイパーループ開発の主な企業の1つであるVirgin Hyperloop Oneは2017年5月と7月に原寸大での走行テストを成功させています。シャシー部分に車体を取り付けて行われた7月の走行テストでは437mの距離を走り、最高速度は310kmをマーク。Virgin Hyperloop Oneは2020年に貨物用に、2021年には乗客を乗せてのハイパーループ運用を目標として掲げていることからも、実用化は秒読みと言っていいでしょう。
(Virgin Hyperloop Oneフェーズ2テストの様子)
ですので今後の課題としては、例えば地震やテロ対策を含めた運用上の安全確保、運用や維持管理コストなどを含めた採算性、そして設置する場所の法規制とのすりあわせなどが浮上すると予想されています。
本記事では、超電導リニアとハイパーループの技術的な部分を見ていきました。次回の記事では、実際の運用開始までにどのような軌跡をたどったか、どのような課題があったのかを見ていきます。