

前回の技術解説編に引き続き、今回は超電磁リニアとハイパーループの実用化に向けた流れをそれぞれ解説していきます。
車体と他のものの抵抗をなくすという、共通の発想から出発した両技術。実用化までの道のりの違いを一言で言うならば、国家主導か、企業主導か、という点です。
日本でのリニア実用化の動き
日本の超伝導リニア開発は1962年、JRの前進である国鉄(日本国有鉄道)が着手したのが始まりです。
東京―大阪間を1時間で結ぶ超高速鉄道開発を目指し、国鉄はリニアモーター推進と磁気浮上を組み合わせた高速鉄道というアイデアに着目。1966年には超伝導磁石を用いた磁気浮上に関する研究がアメリカで発表され、国鉄はこれをもとにして開発を進めていきました。そして1972年には超伝導磁石を搭載した実験車の浮遊走行に成功します。
翌1973年には、現在の中央リニア新幹線計画の基本計画が決定。この後、1974年から2008年までの間、34年間にも及ぶ地質調査が行われました。路線はその後諮問や整備計画決定などを経て、2014年末に念願の着工にこぎつけます。
この間、日本の超電導リニアは着実に成果を上げていきました。技術開発の要となったのは、超伝導磁石の軽量化です。
超伝導磁石はコイルを極低温に保つため高性能の冷却装置が必要です。そのため装置は非常に重くなり、研究初期に開発された浮上実験用の超伝導磁石は重さ2トン、1972年に走行した実験車両には1個1トンの超伝導磁石が2個搭載されており、車体重量の半分以上を占めるという状況でした。
この重量の問題は、磁石の配置方法を変えることで大きく改善されました。
初期の超伝導リニアは、凸状のガイドウェイに凹型の車体が乗っかるようなかたちになっていました。ガイドウェイの推進コイルは地面に、浮上コイルは壁面に配置されており、それぞれのコイルからの磁力を受けるため、車体にも浮上用と推進用に別々の超伝導磁石が搭載されていました。
ところが、車体に搭載された推進用の超伝導磁石が地面の浮上コイルからの磁力を受けていて、浮上力の半分近くを担っていることが後に判明します。そこでガイドウェイと車体の位置関係を変更し、車体の超伝導磁石を浮上・推進両方に使えるような配置に変更。こうすることで車体に搭載する超伝導磁石の数を減らすことができ、浮上力はそのままに磁石の重量を事実上半分にまで減らすことに成功しました。
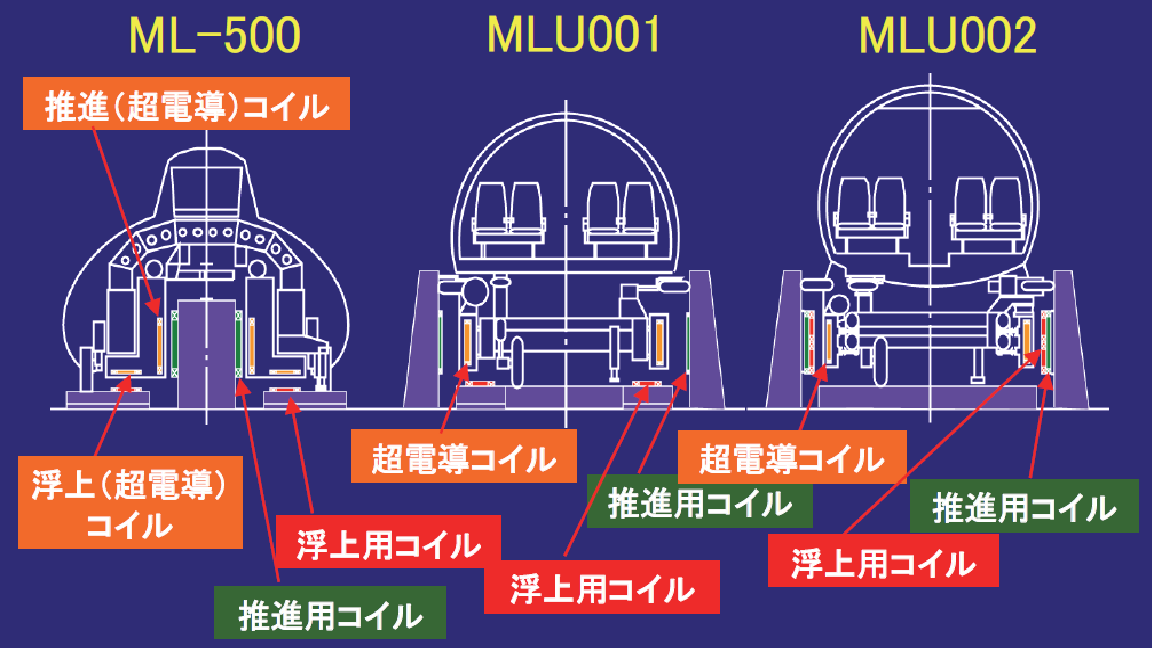
(コイル配置方法の変化のようす。左から右へと発展していった。出展: やさしい超電導リニアモーターカーのお話(その 1) ~リニアモーターカーとは~)
その後、コイル配置は全てガイドウェイの壁面に統合されます。現在の超電導リニアのシステムはここで完成を見ました。
国鉄が民営化した後、中央新幹線でのリニア運行はJR東海が精力的に進めていきました。
2000年代中盤以降、東海道新幹線の輸送量向上を理由として、JR東海はさらなる高速鉄道の必要性を強調してきました。ルート選定、資金計画の見直し、開業時期の延期など難局はありましたが、とうとう2015年、路線工事の本格着工までこぎつけました。
これからの大きな課題は、路線敷設にともなうトンネル工事です。
最終的に決定されたルートは南アルプス山中を通る「南アルプストンネル」の開通が前提となってきます。これは山梨県と長野県を結ぶ全長25kmのトンネルで、糸魚川静岡構造線という活断層を通るため、地質学的に工事の難しい難所として知られています。
トンネル工事は、発破ないし機械でトンネルを掘った後すぐにコンクリートで固め、ロックボルトを打ち込んでいくNATM工法という方法で進められます。
中央新幹線は2027年に東京―名古屋間で先行開業予定。東京―名古屋―大阪の3都市を結ぶ全線の開業予定は2037年となっています。
リニア中央新幹線開通の大きな効果として、国土交通省は「スーパーメガリージョン」の形成を挙げています。
これは東京―名古屋―大阪間を1時間で移動できるようになることで、3都市を1つの巨大な都市として運用するという構想です。各都市の国際空港や国際コンテナ港湾をそれぞれ補完的に活用することで効率化が促され、海外からの人・モノ・カネ・情報の流入がスムーズになります。こうして東京―名古屋―大阪をまとめたスーパーメガリージョン内に人・モノ・カネ・情報が集積することでイノベーションが促進され、新たな価値が生み出されればさらなる集積の呼び水となるという良循環が生まれる、というのがスーパーメガリージョン構想の軸になります。
半世紀以上の長きにわたって研究を続け、完成すれば都市圏のあり方を一変させる可能性まである日本の超伝導リニア開発は、まさに国家的な一大プロジェクトと言っても過言ではないでしょう。
(次ページ:ハイパーループの実用化)
ハイパーループ実用化の動き
以前の記事でも少し触れましたが、ハイパーループはオープンソースの初期設計をもとに複数の企業が同時に研究開発と実用化を進めています。初期の設計をまとめたイーロン・マスク自身は直接開発を行わず、開発者向けにテストコースの提供やデザインコンペ開催を行うなど、間接的な開発支援に徹している点が特徴です。
本記事では、ハイパーループ開発に携わる大手企業3社の動きを見ていきます。
Virgin Hyperloop One
Virgin Hyperloop Oneの創業は2014年で、創業当初はHyperloop Oneという名称でした。2017年10月にイギリスのヴァージン・グループが大規模投資を行ったのと時を同じくしてVirgin Hyperloop Oneという名称になりました。
同社は2016年11月の段階で、ドバイ道路交通庁とハイパーループ建設の契約を締結しています。計画ではドバイとアラブ首長国連邦を結ぶルートに建設され、現在車で2時間の距離をわずか12分にまで短縮することができると期待されています。同年10月には、世界各地からハイパーループ路線建設候補地を選定するためのグローバルチャレンジを開催。米国、カナダ、メキシコ、イギリス、インドの5か国から10か所の候補地が最終的に選ばれ、これらの地域と連携して建設への動きを進めていく予定です。
2017年5月12日には世界で初めてフルスケールでの走行実験に成功。8月2日には車体を取り付けたポッドの走行試験を行い、300メートルほどの距離を最高時速309km/hで走行しました。
HTT(Hyperloop Transportation Technologies)
2013年創業のHTTは、一部の人材をクラウドソーシングで集めるというクラウドコラボレーションアプローチでハイパーループの開発を行っている会社です。全員フルタイムで働いているわけではなく、給与を受け取って働いているけれど、本業が別にあるという社員もいるのだとか。
HTTはすでにスロバキア、アブダビ、韓国、インドでのハイパーループ建設を受注しており、Virgin Hyperloop One同様に早くから世界的に展開している企業です。
HTTのハイパーループは初期設計案で採用されていたエアクッションではなく、磁気浮上で車体を浮上させる方式を採用しています。
Transpod
最後はカナダで2015年に創業されたTranspod。ここでもハイパーループの浮上方式は磁気浮上が採用されています。
現在はトロント―ウィンザー間を結ぶ路線を設計中で、2017年3月からアルバータ州でのテストトラック建設が進んでいます。Transpodは路線の敷設・維持コストの低さを強みとして掲げ、現在カナダ国内に焦点を絞って建設計画を推進中。2017年6月にはカナダ政府とオンタリオ州から11億8500万ドルの資金提供を受けるなど、着実に土台を築いています。
浮き上がって路面との摩擦を減らし、高速で人を運ぶ鉄道――という出発点から、それぞれ異なるかたちで実用化されようとしている超伝導リニアとハイパーループ。これらが現実のものとなったとき、世界の交通事情はどう変わるのか? わからないことや困難はまだまだあるのでしょうが、変わる世界を見るのが楽しみになってきますね。