自動運転車の技術開発が進み、今では車が障害物の前で勝手に止まることも道路に沿って勝手にハンドルを切ることも当たり前になってきました。いずれは運転手が必要なくなると言われているものの、完全に運転手が関与しない自動運転車は現時点では市販されていません。
だからといって運転手の要らない自動運転車が存在しないわけではなく、既に運転手が必要ない車は公道を走るようになっています。中でも、運転席が存在せず無人で走行するものを「無人運転車」と呼びます。これはある意味では、究極の自動運転車とも言えるものです。現代の無人運転車はどの程度のレベルに達しているのでしょうか。
無人運転車と自動運転車の違い
無人運転車について話す前に、混同するといけないので無人運転車と自動運転車の違いについてお話しましょう。違いと言っても大したものではありません。システム側が独自の判断で車を操作する「自動運転車」という枠組みの中に、運転席の存在しない「無人運転車(無人走行車)」があるというだけです。また、4段階に分けられる自動運転車のレベルで言えば、無人運転車は「完全自動走行」が可能なレベル4(5段階に分けた場合はレベル5)に相当します。
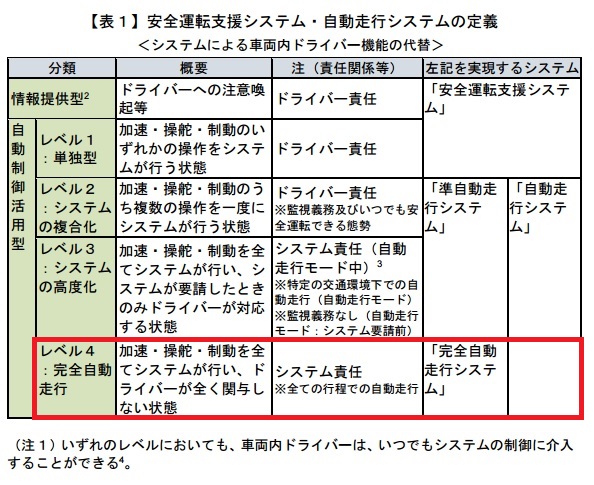
(自動走行システムの定義_官民ITS構想・ロードマップ2016)
レベル4には運転席があるものと無いもの(実質的にレベル5)が含まれていますが、どちらも完全な自動走行が可能なため、運転によって生じた責任は全てシステム側が負います。つまり、標識・車両・歩行者の見落としは全てシステムを開発した設計者側の責任になるということです。
2017年3月の時点で市販されている自動運転車は精々「レベル2」のもので、何かあった場合は全てドライバーの責任となります。ハンドルから手を離すことも、スマホを見ながら運転することも許されません。そのため、レベル2以下の自動運転車の開発者はいざという時には運転手が関与することを想定してシステムを作れます。
一方、レベル3以上の自動運転車は「自動運転中は運転手による監視義務なし」となっているため、運転手が寝ている可能性もあります。レベル3以降の自動運転車では特定の交通環境を含め、システム側が完璧に運転しなければなりません。
完璧な運転を実現するために
システム側が責任を負わなければいけない無人運転車では、完璧に近い運転能力が無ければ公道を走るなんてことはできません。信号はもちろん、標識・車両・歩行者全てを確実に認識できなければならないのです。
これはそう簡単なことではありません。常に移動する車両や歩行者はどこから現れるか分かりませんし、標識や表示は種類が多く、天候や路面状況によっては確認できないこともあります。どうすれば良いのでしょうか?
信号は簡単です。信号で見るのは「色」だけです。文字や形を見るのに比べれば遥かに簡単なため、カメラによる認識で簡単に実現できるでしょう。また、信号側が「信号の色」に関するデータを無線で送ってくれれば、カメラで認識する必要もありません。
難しいのは車両や歩行者の把握です。レーダーやカメラを使って完璧に把握できるようにしておかなければなりませんが、視界の悪い道路や天候によっては限界があるでしょう。車両や人間を正しく把握できるような道路だけを選んで走るのが理想です。
標識や表示については、カメラと人工知能によって情報を認識すること自体は可能です。ただ、認識できたとしても標識・表示・道路形状の組み合わせによって発生する交通ルールは複雑で、「無数の組み合わせによって発生するあらゆるパターン」を想定した上で完璧に運転できるシステムを作るのはまだ現実的ではありません。
この問題を解決するアプローチとして、これから走るルート上の交通ルールと道路の形状を予め記録してしまうというものが考えられています。標識や表示の組み合わせが決まっていればそのルールに合わせてシステムを作れば良く、考えるのは歩行者や車両のような障害物だけになります。
つまり、現時点の技術力で完璧な自動運転を実現できるのは「特定のルート上だけ」ということです。実際、監視員無しの無人運転車が走っているのは特定のルートだけで、人間が運転するようにあらゆる目的地へ向けては走りません。
特定ルートしか走らない無人運転車でも、定期ルートを通るバスやトラックならそのまま使えます。また、運転席がある自動運転車に使えば、特定のルートを通っている間にドライバーは休息を取れます。ドライバーの負担は大きく軽減されることでしょう。
では、お客を好きな場所に届けてくれる「無人タクシー」が実現不可能なのかというと、そういうわけでもないのです。
(次ページ:人間に並びつつある運転能力)



